英特佩斯ValueCAN4-2操作手册中文翻译版
简介和概述
2.1简介
ValueCAN 4-2是英特佩斯控制系统的第四代通用接口工具,支持多路CAN FD通道。ValueCAN 4-2可用于在CAN和CAN FD网络上监测或发送报文。它还可以创建用于网络分析的硬件模拟。
ValueCAN 4-2对原始ValueCAN3进行了许多改进,包括支持CAN FD、更高的性能、更坚固的外壳和接口。
包装内容
ValueCAN 4-2包装包括硬件和软件:
硬件
包装包括以下内容:
-
-
-
- ValueCAN 4-2网络接口设备。
- 快速入门卡,可帮助您快速开始使用设备。
-
-
软件
ValueCAN 4-2包装包括以下内容:
-
-
-
- 英特佩斯控制系统的Vehicle Spy车辆网络软件的副本。
- ValueCAN 4-2系列适配器的驱动程序。
- 包含用于配置设备的neoVI Explorer实用程序的API安装工具包。
-
-
如果您没有购买Vehicle Spy,我们将为您提供最基本功能的免费试用版。
还可以使用设备支持的API在其他软件中控制ValueCAN 4-2。

图 1: ValueCAN 4-2包装形式
如果有任何丢失或损坏,请联系英特佩斯寻求帮助。
操作概述
ValueCAN 4-2的用途大致可分为三类:车辆网络接口、数据采集以及模拟仿真和脚本编写。
车辆网络接口
使用配套的线束,您可以将ValueCAN4-2设备连接到试验台架或实车来监测总线上的实时数据。可以同时监控所有通道并加盖硬件时间戳。
数据采集
ValueCAN 4-2能够从网络采集数据,并精确控制集合参数。数据可以在Vehicle Spy中采集,也可以使用英特佩斯API采集。
模拟仿真和脚本编写
使用Vehicle Spy,您可以定义带有自定义数据的捕获报文,并手动发送或按您选择的时间表发送。您还可以编写实现任意逻辑的智能脚本并将它们编译成在设备本身内运行的CoreMinis。此功能允许您创建专门的测试场景,并模拟ECU和网关。
主要功能总结
本节包括设备最重要的设计、构造、操作和性能特点:
结构、控制和线束
-
-
-
- 紧凑型设计:2”x1.3”x0.5”。
- 重量轻:小于3盎司(80克)。
- 固体粉末涂层铝制表壳。
- 厚橡胶套,提供防震保护。
- 防水金属接口。
- 多种USB线束选项,包括USB A型和USB C型连接。
- CAN/CAN FD通道状态指示灯。
- 能够控制两个通道上的CAN/CAN FD终端电阻。
-
-
性能
-
-
-
- 第四代neoVI架构,性能是早期设备的十倍以上。
- 可现场升级的固件。
- 减少了USB延迟。
- CAN FD波特率支持高达8Mbps。
- 更低的功耗。
- 仅通过USB供电。
-
-
网络端口和功能
-
-
-
- 两个专用的双线CAN/CAN FD通道(ISO 11898-2:2015)。
- 两个双线CAN通道均支持CAN FD。
- 支持ISO CAN FD和非ISO CAN FD。
- 软件可编程CAN终端电阻。
- 用于64位报文时间戳的实时时钟。
-
-
模拟
-
-
-
- 使用CoreMini和Vehicle Spy专业版或企业版完全可编程脚本的版本。
-
-
电脑接口支持
-
-
-
- 高速隔离USB连接可保护PC免受潜在损坏。
-
-
熟练功能
-
-
-
- 设备由外部软件使用三个开源API进行控制:neoVI DLL、SAE J2534和TMC RP1210 A/B。
-
-
硬件和软件要求
硬件:
建议使用CAN或CAN FD网络,无论是车载、测试台架还是其他环境。
具有USB 2.0端口(A型或USB-C接口)的电脑。建议使用自带USB端口,以确保提供足够的电源。
软件:
Vehicle Spy的安装程序是ValueCAN 4-2安装必要的驱动程序。如果您没有Vehicle Spy Vehicle Spy license,您可以使用Vehicle Spy试用版进行基本网络接口和驱动程序安装。还可以使用API工具包安装驱动程序。所有这些软件都可以在英特佩斯控制系统网站下载。https://www.intrepidcs.com/support/。
有关更具体的电脑硬件和操作系统要求,请参阅Vehicle Spy文档的要求和建议。
ValueCAN 4-2硬件概述
警告
请勿尝试打开外壳,除非英特佩斯控制系统的技术人员特别指示这样做。否则,设备可能会受到伤害或损坏。
案例和整体设计
ValueCAN 4-2封装在坚固的铝合金外壳中。设备已专为车内使用而设计和测试。工作温度范围为-40°C至+85°C。ValueCAN 4-2外观视图如图2所示。

图 2: ValueCAN 4-2设备
接口使用增强金属接口进行加固,并具有橡胶套保护设备免受碰撞和跌落。
3.1.1 neoVI ValueCAN 4概述
ValueCAN 4-2的标签显示设备序列号及其DB-9接口的针脚定义。ValueCAN 4-2接口和线束的针脚定义如图3所示。
设备上有三个LED灯表示设备和CAN连接的状态。两个位于设备顶部,另一个位于USB线束下方。有关LED指示灯和模式的参考信息,请参见第7.2节。

图3: ValueCAN 4-2正面图示
线束选项
ValueCAN 4-2有多种线束可供选择。ValueCAN与ValueCAN 4-2的针脚输出兼容。有三种不同的线束可适配于ValueCAN 4-2。

图4: ValueCAN OBD-II线束(DB-9F to OBD-Ⅱ)部分#OBD2-Y型分线器

图5:ValueCAN Deutsch 9-Pin(J1939-RP1210)线束(DB-9F to Deutsch 9-Pin)部分#J1939线束

图 6: ValueCAN3通道Y线(DB-9F to 2x DB-9M)部分#VCAN3-Y-DB9
硬件设置
连接框图
连接图一目了然地显示了如何将ValueCAN 4-2连接到车辆网络和您的PC。
Deutsch 9-Pin硬件连接示意图

图 7:ValueCAN Deutsch 9-Pin(J1939-RP1210)线束(DB-9F转 Deutsch 9-Pin)的接口示意图部分#J1939-线束
OBD II硬件连接图

图 8: ValueCAN带OBD-II线束(DB-9F转OBD-11)部分连接示意图#OBD2-Y型分线器
-
-
- DB9 Y型分线器线束硬件连接图
-

图9:ValueCAN DB9 2x Y型分线器线束连接图部分#VCAN3-Y-DB9
车辆网络和电源连接
集成的DB9接口用于连接到车辆/工作台CAN网络。CAN终端集成在ValueCAN 4-2中,可以从neoVI Explorer软件界面启用。
注意
ValueCAN 4-2 只能通过USB线束供电。
注意
CoreMini脚本在设备通电且未连接到电脑的USB端口(所列举的)时运行。因此,若要独立运行脚本,建议使用仅电源USB线束以防止枚举。使用充电器或电源组为ValueCAN 4-2 供电也可以工作。
电脑连接
将USB Type A/Type C连接到电脑的USB端口。可以使用供电的USB集线器连接ValueCAN 4-2,但性能因集线器的质量和供电能力而异。请确保使用高功率USB集线器,并在使用ValueCAN 4-2之前用它对集线器进行测试,然后再使用。
设备配置
ValueCAN 4-2出厂时采用默认设置。
要考虑的默认设置包括:
-
-
-
- 两个CAN FD网络均已启用。
- 经典CAN 模式设置为500Kbps。
- CAN FD模式设置为2Mbps。
- CAN 终端电阻禁用。
- 正常通信模式(允许发送、接收和确认)。
-
-
本节稍后将介绍其他默认值。
请注意,应用程序所需的设置可能与默认设置不匹配。您可以根据您的确切需求自定义设置。本节介绍如何管理和微调您的ValueCAN 4-2。
启动neoVI Explorer
在Vehicle Spy中启动neoVI Explorer
本节介绍如何从Vehicle Spy中打开neoVI Explorer:
-
-
-
- 菜单项:从顶部菜单中选择“Setup”,然后选择“Hardware”。
- 硬件设置按钮:单击位于主Vehicle Spy工具栏菜单下方的“Setup Hardware”按钮(图10)。
-
-

图 10在Vehicle Spy中启动neoVI Explore
请注意,当Vehicle Spy在线时,您无法启动neoVI Explorer(即使在模拟模式中也是如此)。如果您尝试这样做,Vehicle Spy将提示您离线启动neoVI Explorer或使用Vehicle Spy保持在线。
启动neoVI Explorer作为独立程序
如果您想在不打开Vehicle Spy的情况下使用您的ValueCAN 4-2,您可以直接启动neoVI Explorer。首先,使用Windows操作系统打开“Windows Start Menu”,导航到Intrepid CS文件夹,然后在Vehicle Spy 3或ICS API安装套件子文件夹下,选择“neoVI Explorer“,如图11所示。
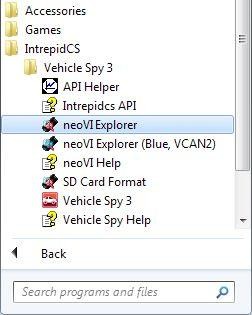
图11:在已安装Vehicle Spy3 的情况下直接启动neoVI Explorer
连接ValueCAN 4-2
当neoVI Explorer加载时,它将启动在左侧的菜单窗格找到的第一个硬件设备。您可以在此看到您的设备及其序列号。如果您没有看到该设备,但看到其他英特佩斯控制系统的设备,请务必向下滚动寻找。如果仍然查找不到设备,则要么是驱动程序没有正确安装,要么是没有正确供电。
要管理您的ValueCAN 4-2,请在导航窗格中单击其条目,然后按“Connect”按钮。成功连接到设备后,您将看到设备名称旁边有一个竖起的大拇指图标。左侧资源管理器区域中已启用的网络旁边会出现复选标记图标。您还将在右侧的消息框中看到一条消息,内容为“ValueCAN 4 Settings have been read”。窗口右上角的信息与设备有关,详见第5.2节。整个屏幕应类似于图12所示。
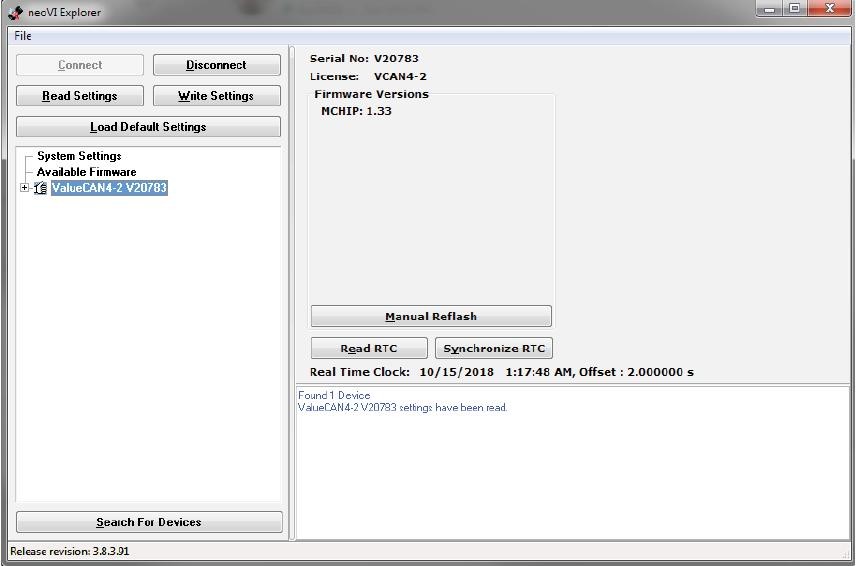
图12:初始连接到ValueCAN 4-2后的典型neoVI Explorer窗口图
注意
单击“Connect”时,列出的设置将更新。在连接到硬件之前所做的任何更改都将被覆盖。
写入和重载设置
为避免潜在问题,neoVI Explorer不会保存对设备参数的任何更改,直到你指示它这样做。这是通过按“Write Settings”按钮来完成的,该按钮将更新设备固件中的参数。如果您进行了不想保留的更改,按“Read Settings”按钮将重新加载存储在设备中的设置,擦除任何在neoVI Explorer中进行的但尚未保存的修改。
只有在单击“Write Settings”后,设置才会保存到设备中。一旦点击,硬件配置将保存到硬件中。您可以使用“Read Settings”中显示的设置恢复到当前存储在硬件中的设置。
重载设备默认值
要将所有设置恢复为出厂默认设置,请按“Load Defaults”按钮。您将在消息区域中告诉您默认值已发送到设备,然后从设备中读取。“Load Defaults”功能自动执行“Write Settings”按钮,因此使用“Load Defaults”时无需写入设置。
断开与ValueCAN 4-2的连接
完成设备设置后,按“Disconnect”按钮。此步骤是可选的,因为当您退出程序时,neoVI Explore将与任何连接的设备断开连接。
寻找设备
如果您在启动neoVI Explorer后将新硬件连接到PC,请按“Search For Devices”按钮,提示程序扫描新的您可以管理的硬件。
退出neoVI Explorer
像任何Windows程序一样,您可以通过单击右上角的“X”来关闭neoVI Explorer。
系统设置和固件更新
neoVI Explorer左侧资源管理器窗口中,顶部的两个条目包含适用于所有硬件设备的全系统设置,以及与固件更新相关的信息。
系统设置
通过单击右侧窗格中的“Systems Settings”,您将看到四个设置,您可以启用或禁用(图13)。
-
-
-
- 启用服务器:打开neoVI服务器功能,这是一个后台程序,允许您的硬件同时被多个应用程序使用。
- 启用低延迟:对于发送后需要快速响应的应用,这是一个熟练设置。它不适用于ValueCAN 4-2设备。
- 启用从属VNET设置:此设置对ValueCAN 4-2没有影响。
- 启用自动更新:启用后,neoVI Explorer和Vehicle Spy都将自动更新固件。建议选中此复选框。如果未选中此框,则必须手动更新固件(详见下文)。
-
-
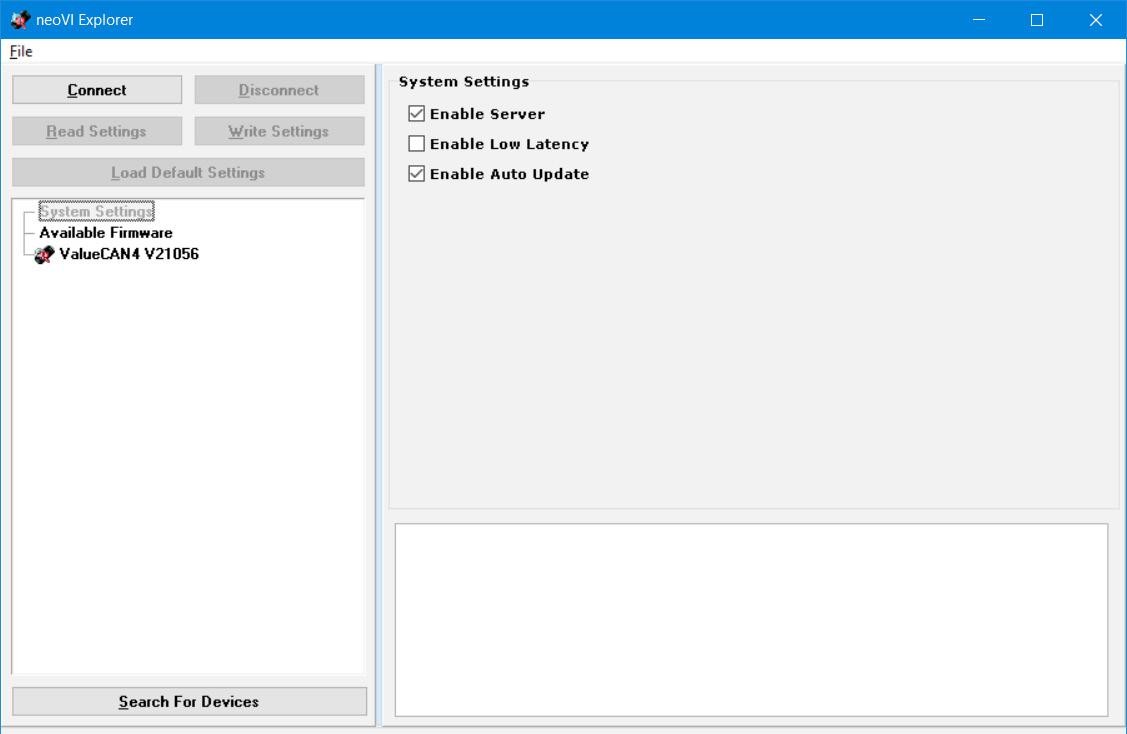
图13: neoVI Explorer系统设置界面
更新固件
确定新版本的固件会定期创建,以实现新功能并纠正已发现的问题。
如果您开启了“Enable Auto Update”功能,固件将在出现不匹配时进行更新。屏幕上会出现对话框,显示此操作的进度。图14中显示了一个示例。红色的固件版本表示硬件中的固件与软件不匹配。硬件中的固件与软件不匹配。黑色固件版本表示所有内容都是最新的。
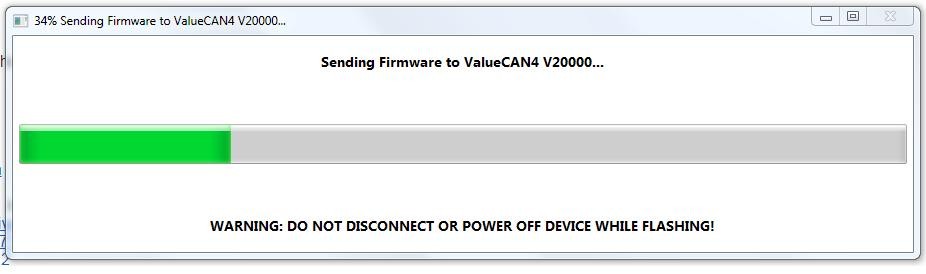
图 14: 固件下载对话框
如果未启用自动更新,则可以手动控制固件任何时间更新。当新固件可用时,您将在右侧窗格中收到通知,如下一页的图15所示。只需按“Manual Reflash”按钮即可更新固件。当MCHIP固件程序发送到设备时,您将在右侧的消息框中看到消息,告诉您该过程已完成。
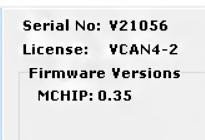
图 15: neoVI Explorer固件信息框和手动刷新按钮
常规设置和产品详细信息
ValueCAN 4-2设置的这两个区域提供有关设备的信息,并允许您执行一些基本的维护任务。
常规设置
连接到设备后,窗口如图16所示:
-
-
-
- 设备的序列号。
- 设备中当前固件版本。如果有新固件可用,它将显示一个指示器。
- 已识别显示设备硬件license的消息。
- ValueCAN 4-2实时时钟的当前读数。
-
-
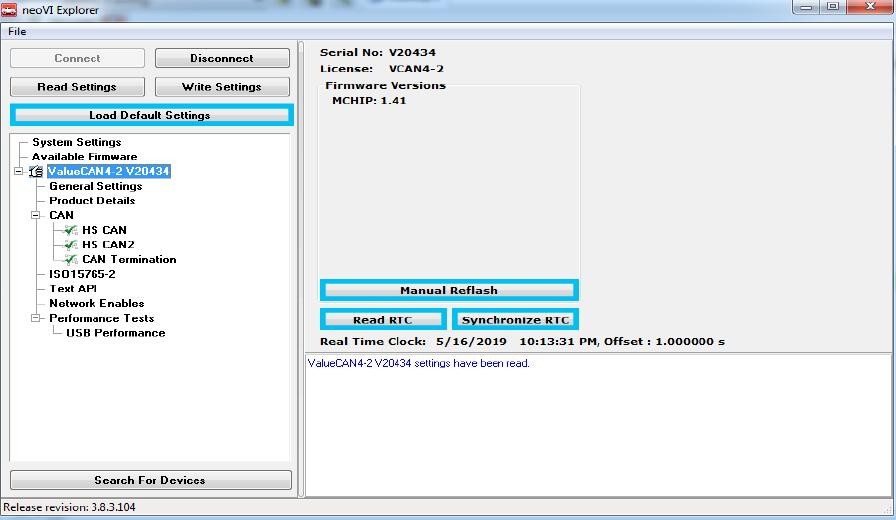
图16: neoVI Explorer VCAN 4-2常规设置
点击屏幕左侧资源管理器导航窗口中的设备序列号或“常规设置”条目,可随时再次显示此信息。
ValueCAN 4-2的MCHIP和CCHIP固件版本如果与neoVI Explorer中的固件版本匹配,则会以黑色显示。不匹配,则最新版本将显示为红色,表示需要更新
此屏幕上有四个按钮此屏幕上有四个按钮:
“Load Defaults”: 加载设备的默认出厂设置。
“Manual Reflash”: 手动更新不匹配的固件。
“Read RTC”: 重新加载设备的内部时钟。
“Synchronize RTC”: 将设备的时钟设置为与PC的时钟相同的值。
产品详细信息
此区域提供有关ValueCAN 4-2硬件和内部设置的技术数据。通常您需要设备的产品详细信息,以便英特佩斯控制公司的技术人员便于提供支持或故障排除的系统。您可以使用“Copy To Clipboard”按钮将所有信息复制到“Windows Clipboard”,以便将其粘贴到电子邮件中或文件。
标准CAN网络(HS CAN和HS CAN2)
neoVI Explorer的此区域用于启用,禁用和配置两个标准双线ValueCAN 4-2中的两个高速CAN 通道1和2(HS CAN 和 HS CAN2)。
每个通道在“CAN”组下都有一个条目(无法单击其本身)。当前每个通道的状态都显示在其名称旁边;绿色复选标记表示通道已启用,而红色X表示已禁用。图17显示了CAN通道的区域示例。
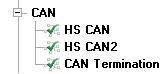
图 17: neoVI Explorer CAN组
可以使用右侧窗格中的控件进行配置;默认设置如图18所示。
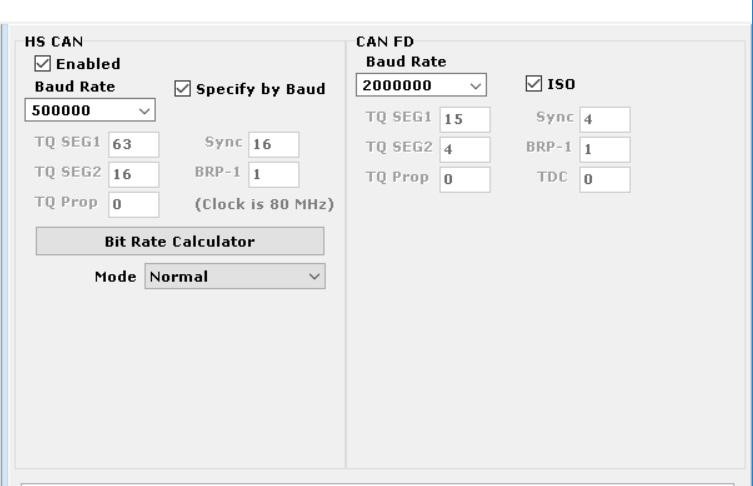
图18:NeoVI Explorer标准CAN默认设置参数
启用
在此框中打勾以启用通道,或清除复选标记禁用。禁用时,则所有其他参数控件均处于禁用状态(灰显)。注意:如果禁用,将不会在此通道上接收数据。
波特率指定
这是一个主控制项,用于确定通道的运行是由波特率数字控制,还是由低级定时参数计算。当“Specify by Baud”被选中,只需从下拉列表中选择波特率即可。“Specify by Baud”是默认设置,除特殊要求的熟练用户建议保持默认设置。
波特率
选择“Specify by Baud”时,从下拉框中为通道选择波特率下面。默认值为500000。
CAN 定时设置
取消选择“Specify by Baud”时,CAN通道的波特率和采样点为基于以下五个设置:TQ SEG1、TQ SEG2、TQ Prop、Sync、BRP-1。这些适用于高级设置,通常应保留默认值。
CAN FD波特率
选择“Specify by Baud”时,为CAN FD报文发送阶段选择波特率。默认值为2000000。
CAN FD定时设置
当未选择“Specify by Baud”时,请使用以下设置TQ SEG1、TQ SEG2、TQ Prop值用于计算CAN FD报文数据阶段的波特率和采样点。
模式
通道的操作模式,从以下三个选项中选择之一:
-
-
-
- 正常:正常操作(默认)。此设置允许发送、接收和确认CAN报文。
- 禁用:通道已禁用。
- 仅收听:此通道仅接不发送的消息。不会生成错误帧,也不会发送确认。注意:此设置将覆盖Vehicle Spy中的任何发送或相关设置。
-
-
收发器
CAN收发器的工作模式:
-
-
-
- 自动:收发器由通道的CAN逻辑自动控制(默认)。
- 启用:收发器始终处于启用状态。
- 禁用:收发器已禁用。
-
-
比特率计算器
按此按钮启动英特佩斯定时计算。
核心功能
本章将向您展示ValueCAN 4-2的各种应用。
每一节都包含一个应用示例,并尽可能提供分步说明,供希望在自己的设备上复制结果的用户使用。本章的目的是帮助那些刚接触英特佩斯控制系统硬件和软件的用户,为用户提供了简化的示例。熟练用户可以略读甚至跳到最后2个示例。
这些示例使用英特佩斯控制系统的Vehicle Spy。它是与您的ValueCAN 4-2的共同使用的理想工具。由于Vehicle Spy的复杂性,本示例仅介绍必要的基础知识。有关该软件工具的全部详细信息,请参阅单独的Vehicle Spy文档。
监测CAN/CAN FD网络
ValueCAN 4-2最基本的用途是监测传统CAN/CAN FD车辆网络的运行。
正确配置设备后,请浏览示例以了解ValueCAN 4-2如何使用Vehicle Spy 3监控测试台架网络上的CAN流量。
假设您的网络已经有其他设备正在发送的CAN报文,则您可以通过以下步骤监控该报文:
-
-
-
- 通过双击其图标或从“Windows Start Menu”中选择它来启动Vehicle Spy。
- 在“Logon Screen”上,选择ValueCAN 4-2旁边已经有一个复选标记。如果没有,请右键单击设备名称,然后选择“Select Hardware”(图19)。
- 上线:按下Vehicle Spy左上角的蓝色按钮。
-
-
图 19:从Vehicle Spy的登录屏幕中选择ValueCAN 4-2
程序将联机并自动切换到“报文视图”,向您显示报文数据。图20举例说明了正在发送到Value CAN 4-2的CAN报文。默认情况下,共享相同Arb ID(Arb ID)的报文将显示最新的更新的可用数据字节(静态视图)。如果您希望按时间顺序查看报文,请按报文显示屏上方的“Scroll”按钮。
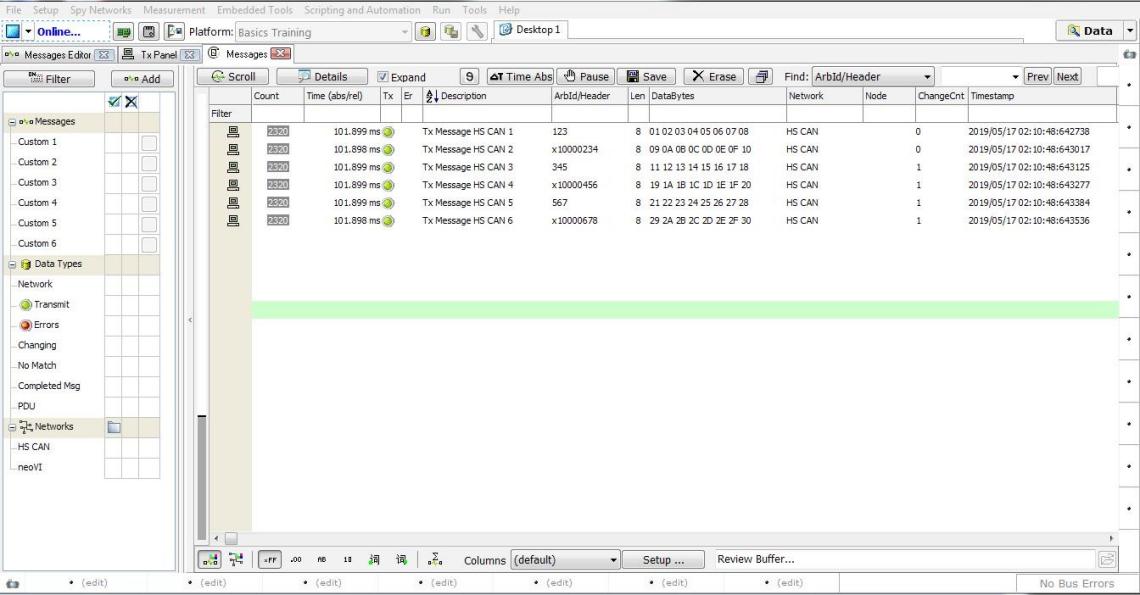
图 20:使用ValueCAN 4-2 监控Vehicle Spy中的报文信息
请注意,CAN报文以其原始形式显示,带有Arb ID和数据字节。如果您可以将与所监控的信息流量相匹配的数据库载入平台。Vehicle Spy会对信息进行解码,并显示每个信息中的信号。有关如何详情请查阅Vehicle Spy文档。
在传统车辆网络上发送
除了使用ValueCAN 4-2监控网络报文外,您还可以生成和发送您自己的报文。这是通过创建然后发送自定义CAN报文来完成的HS CAN通道。
确保ValueCAN 4-2已连接到您的车辆网络,如需要请参阅第3节。然后按照以下步骤创建和发送报文:
Vehicle Spy将生成一个名为“Tx Message HS CAN 1”的新HS CAN发送报文,预设值为
默认值。
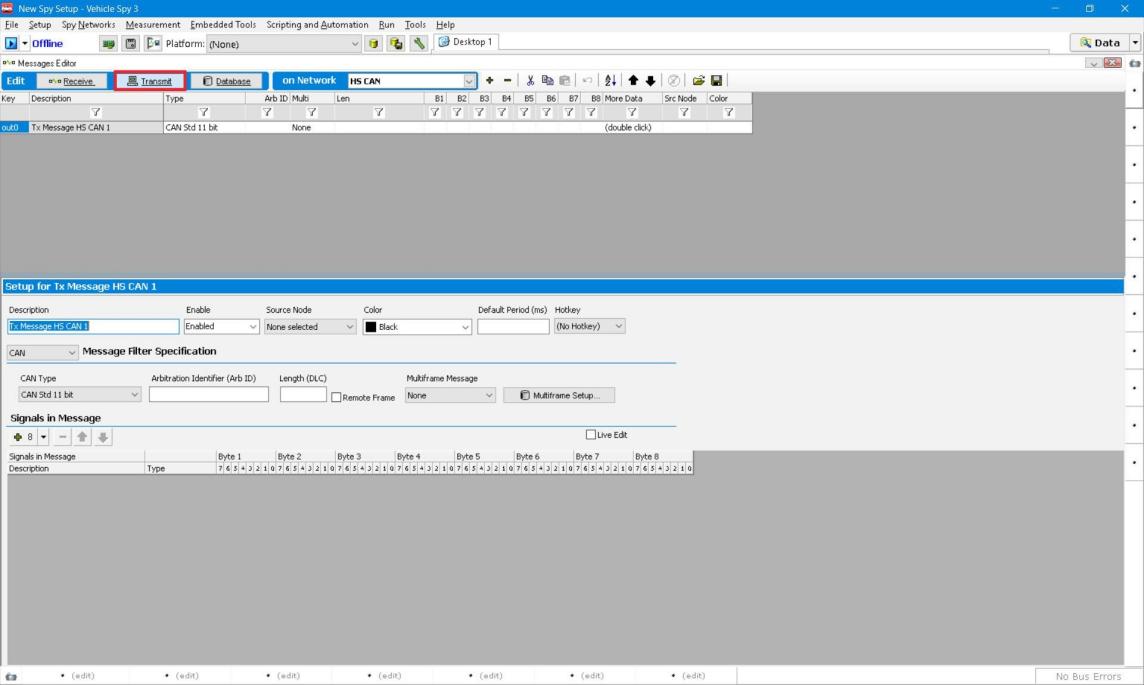
图 21:在Vehicle Spy中创建的默认发送报文
接下来,我们将通过为其分配Arb ID来更改默认消息,添加一个信号,并重命名它。
-
-
-
- 将消息设置为仲裁ID 7E0:在消息的“Arb ID”列下,输入“7E0”。
- 添加消息信号:在屏幕中间,找到“Signals in Message”;就在下面单击按钮。创建一个名为“Signal ”的信号。
- 重命名消息信号:在“Description”列下,双击“Signal 0”,然后将名称更改为“Engine Speed”
-
-
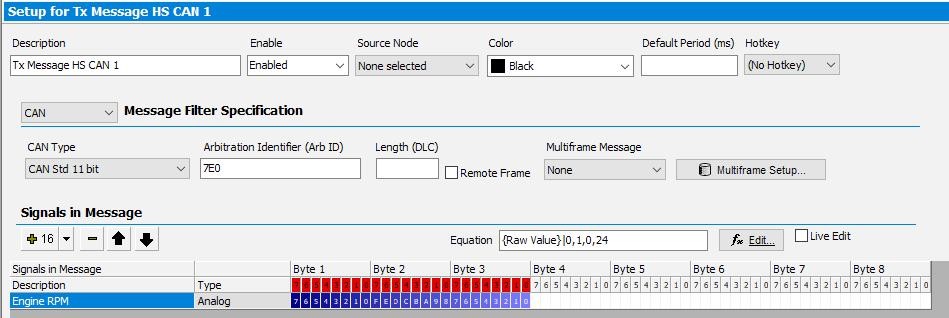 如图22所示,根据上述步骤,信号应显示为““Engine Speed”。
如图22所示,根据上述步骤,信号应显示为““Engine Speed”。
图 22:带有Arb ID和命名信号的Vehicle Spy发送报文
Tx面板将用于指定要发送该信号的简单静态值,然后指示Vehicle Spy定期发送报文
-
-
-
- 加载Tx面板:从“Spy Networks”菜单中选择“Tx Panel”。
- 选择消息:点击屏幕左侧“Description”下的“HS CAN Message 1”。
- 选择发送速率:默认情况下,消息设置为“Periodic”发送,发送速率为“None”。双击该字段,向下滚动并选择“0.100”。
- 设置信号数据值:在屏幕右侧,双击“Value”发动机转速信号,然后输入“207”。(您可能需要先移动垂直分隔线分隔Tx面板两半的栏,通过单击它并将其拖动到左侧)。
-
-
Vehicle Spy中的Tx面板现在应类似于图23。我们的自定义消息准备发送。

图 23:Vehicle Spy Tx面板,具有100毫秒周期速率设置并分配了信号值
切换到“Messages View”并联机查看在CAN上发送的消息网络
-
-
-
- 切换到消息视图:从“Spy Networks”菜单中选择“Messages”。
- 上线:按下Vehicle Spy左上角的蓝色箭头按钮。
-
-
您将能够看到大约每100ms出现一条新的“Message HS CAN 1”消息,如图24所示。请注意Tx列下的绿点,该绿点将其标记为发送的消息。
-
-
-
- 展开消息:按“Message HS CAN 1”左侧的+号
-
-
Vehicle Spy向您显示“Engine Speed”信号,并以两个十进制(207)设置的值和十六进制(0xCF)。
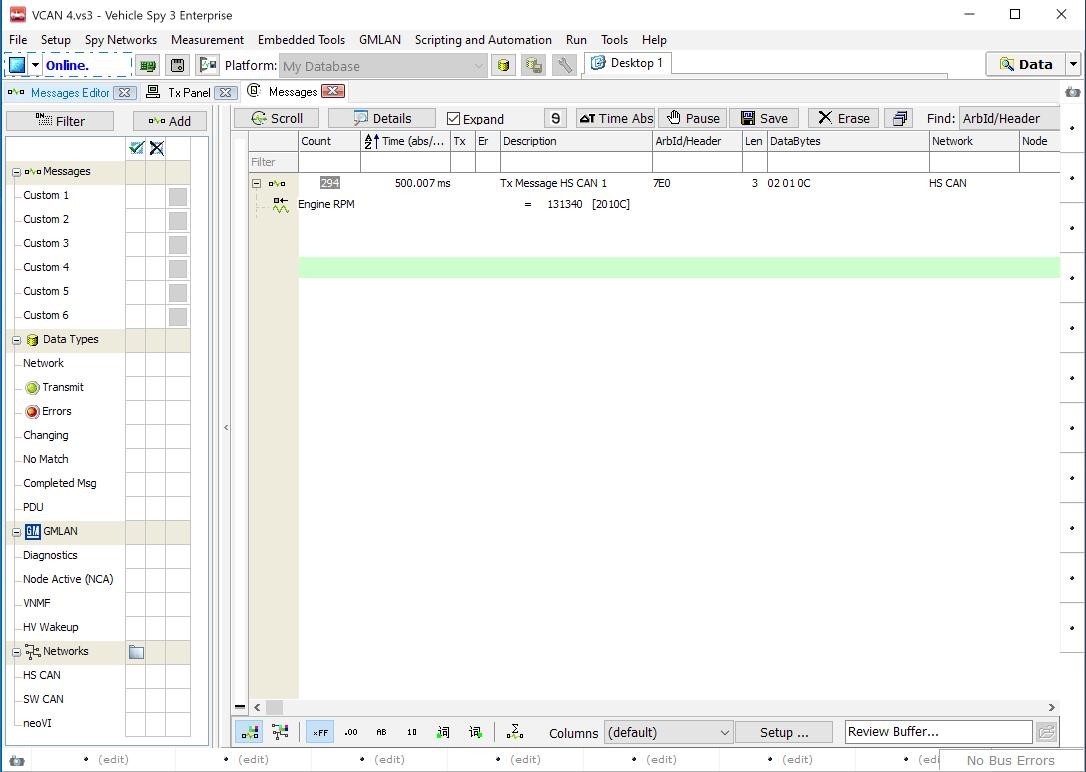
图 24:显示自定义发送报文和信号的Vehicle Spy消息视窗
当然,在真实示例中,您可能希望创建更逼真的发动机转速描述。这可以在Vehicle Spy中以多种方式完成,例如编写功能块程序描述引擎行为和控制消息发送。请参考Vehicle Spy文档、英特佩斯控制系统的网站或技术支持,以获取发送和示例帧的模拟。
CoreMini脚本
ValueCAN 4-2能够独立于电脑运行CoreMini脚本,或者在连接电脑的同时运行Vehicle Spy。
将脚本加载到ValueCAN 4-2后,它可以通过以下两种方式之一运行:
-
-
-
- 将脚本加载到设备中后,将ValueCAN 4-2连接到不枚举ValueCAN 4-2的USB充电器、移动电源或其他USB电源。一旦接通电源,ValueCAN 4-2将运行脚本,并且ValueCAN 4-2未枚举或连接到PC。
- 将ValueCAN 4-2连接到计算机上的标准USB端口。将脚本发送到设备时,请使用“Run CoreMini after download选项。这将在硬件中运行脚本,Vehicle Spy可以同时使用并同时执行其他任务。ValueCAN 4-2将以这种方式运行,直到脚本被清除或与USB端口断开连接。
-
-
有关CoreMini脚本的更多信息,请查阅Vehicle Spy文档。
neoVI API
ValueCAN 4-2支持完整的API,允许您从其他软件包或定制编写的软件。有关使用API的说明,请在英特佩斯控制系统的网站上查阅其文档:https://docs.Intrepidcs.com/neovi-api。
参考: 接口针脚和线束信号映射
ValueCAN4接口针脚
9针接口针脚
| 针脚 | 描述 | 针脚 | 描述 |
| 1 | 无 | 6 | 地 |
| 2 | CAN1低 | 7 | CAN1高 |
| 3 | 地 | 8 | CAN2高 |
| 4 | CAN2低 | 9 | |
| 5 | CAN屏蔽 |
图25: ValueCAN 4-2针脚分配表
LED灯指示含义和模式
| USB LED灯 | CAN LED灯 | ||
 |
电源-橙色闪烁 |  |
发送-绿色 |
 |
USB已连接-白色闪烁 |  |
发送&接收-青色 |
 |
连接网络-蓝/绿交替闪烁 |  |
接受-蓝色 |
 |
CoreMini运行-洋红色闪烁 |  |
报错-红色以较低频率闪烁 |
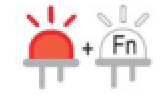 |
USB报错-红色+功能颜色闪烁(这表示DLL出错。可通过关闭Vehicle Spy中的错误窗口清除错误) |  |
报错-红色和绿色以较高频率闪烁 |
原创文章或网络摘录,转载请注明: 转载自守候的时光
本文链接地址: 英特佩斯ValueCAN4-2操作手册中文翻译版

 微信扫一扫,打赏作者吧~
微信扫一扫,打赏作者吧~